机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+2019城市停车博览会,汇聚停车机器人新品发布,精彩回顾!
文章来源:汇聚OMV 浏览次数:2205次
2019年11月21~23日,国际(上海)城市停车博览会在国家会展中心隆重召开,聚焦行业热点话题,以 “停车设备”、“智慧停车”、“充电设备”为三大主题。集中展示了包括智能停车设备、智慧停车系统、停车配套技术与产品、立体停车库、停车管理系统、智能充电设备等领域的应用案例和解决方案,通过专区展现行业最高新的技术和最创新的产品,精彩不容错过。
本次停车展,汇聚自动化推出最新研发的八轮八驱载车板停车机器人和夹持式停车机器人,现场近距离动态演示,简易化的展示整个停车的流程,现场吸引大批观众的围观和咨询。
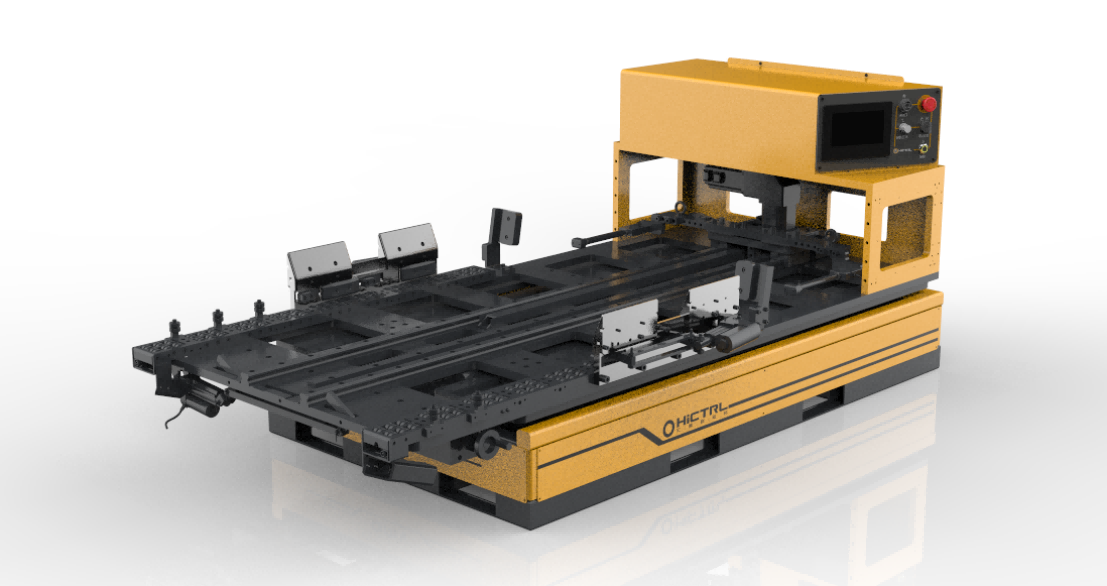
载车板停车机器人:
汇聚第三代载车板式停车机器人,配合新一代的调度系统以及导航系统,柔性化更高、效率更高、操作性更加便捷。
产品特点:
1)采用麦克纳姆全向轮技术,可实现平面内直行、后退、侧移、斜行、自转等任意方向的平面运动,转向时可直接转向、无需调节车身,可在狭小的空间自由穿梭;
2)行走系统采用八轮八驱结构,使车身更低,行走速度更快,载重更大,效率更高;
3)行走系统采用独立悬挂结构,使机器人在运行过程中更加平稳,噪音更低;
4)升降系统采用伺服电动推杆驱动,结构更加紧凑与稳定,并降低了噪音;
5)供电系统采用了车载锂电池,电池在运行过程中更加稳定,续航能力更强;
6)结合汇聚研发的自动导航系统、多车自动调度系统和手机APP,可高效的实现无人全自动存取车。
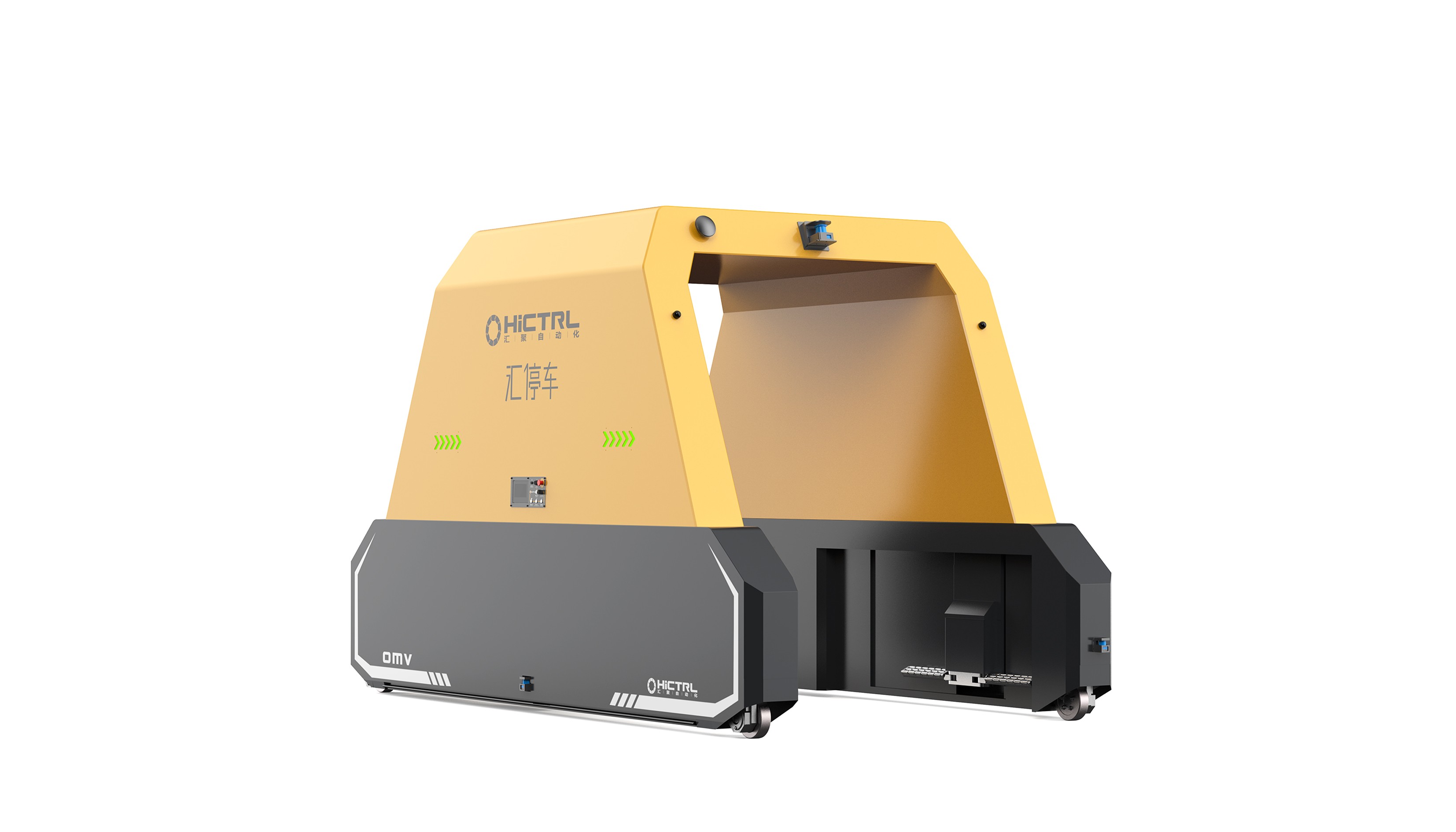
汇聚新一代夹持式停车机器人,具有超轻、超薄,速度快、抱夹时间短、对地面和轨道适应性强等特点。可实现车辆搬运的智能化与柔性化,让停车具有更高的灵活性与适应性。
产品特点:
1、超薄——降层高,低能耗
机器人采用超薄的结构设计,结合轻量化的制作工艺,实现了机器人厚度在140mm以下,相对于其它产品,每层可降低150mm~300mm。本体重量轻,降低了运营成本与建设成本。
2、无车板及车位施工——节省成本
机器人采用夹持轿车轮胎的方式搬运汽车,无需车板和多余的车位大型改造,节约设备成本与施工成本。
3、AGV技术——高效的控制软件与调度算法
利用成熟的AGV技术,将高效的控制软件与调度算法应用到机器人上,实现安全有效的搬运轿车。
停车机器人系统为机器人装上了大脑与眼睛,整体运营调度实现了智能化与柔性化。加上柔性设计,摆脱了轨道与线缆,机器人可以在平面内自由行走,行驶路线规划可选用最高效的方式,也可以按需求进行调节。
5、夹持式搬运——辊筒式设计,不伤轮胎
机器人夹持轮胎的夹臂采用辊筒式设计,解决了轮胎对夹臂的摩擦以及单点受力的情况,避免对轮胎的伤害。
6、模组化设计及标准化接口
维护性好,日常运营检修与维护简便,可快速完成保养,节约运营成本。
停车机器人能够适应市面上百分之九十五以上的汽车,汇聚在研发中对城市停车中的各种状况做出全面考量,推出了与夹持式停车机器人等相配合的停车机器人产品,是行业内极具创新的“八轮八驱”负载板式停车机器人。
本次停车展,汇聚自动化推出最新研发的八轮八驱载车板停车机器人和夹持式停车机器人,现场近距离动态演示,简易化的展示整个停车的流程,现场吸引大批观众的围观和咨询。
载车板停车机器人:
汇聚第三代载车板式停车机器人,配合新一代的调度系统以及导航系统,柔性化更高、效率更高、操作性更加便捷。
产品特点:
1)采用麦克纳姆全向轮技术,可实现平面内直行、后退、侧移、斜行、自转等任意方向的平面运动,转向时可直接转向、无需调节车身,可在狭小的空间自由穿梭;
2)行走系统采用八轮八驱结构,使车身更低,行走速度更快,载重更大,效率更高;
3)行走系统采用独立悬挂结构,使机器人在运行过程中更加平稳,噪音更低;
4)升降系统采用伺服电动推杆驱动,结构更加紧凑与稳定,并降低了噪音;
5)供电系统采用了车载锂电池,电池在运行过程中更加稳定,续航能力更强;
6)结合汇聚研发的自动导航系统、多车自动调度系统和手机APP,可高效的实现无人全自动存取车。

汇聚新一代夹持式停车机器人,具有超轻、超薄,速度快、抱夹时间短、对地面和轨道适应性强等特点。可实现车辆搬运的智能化与柔性化,让停车具有更高的灵活性与适应性。
产品特点:
1、超薄——降层高,低能耗
机器人采用超薄的结构设计,结合轻量化的制作工艺,实现了机器人厚度在140mm以下,相对于其它产品,每层可降低150mm~300mm。本体重量轻,降低了运营成本与建设成本。
2、无车板及车位施工——节省成本
机器人采用夹持轿车轮胎的方式搬运汽车,无需车板和多余的车位大型改造,节约设备成本与施工成本。
3、AGV技术——高效的控制软件与调度算法
利用成熟的AGV技术,将高效的控制软件与调度算法应用到机器人上,实现安全有效的搬运轿车。

停车机器人系统为机器人装上了大脑与眼睛,整体运营调度实现了智能化与柔性化。加上柔性设计,摆脱了轨道与线缆,机器人可以在平面内自由行走,行驶路线规划可选用最高效的方式,也可以按需求进行调节。
5、夹持式搬运——辊筒式设计,不伤轮胎
机器人夹持轮胎的夹臂采用辊筒式设计,解决了轮胎对夹臂的摩擦以及单点受力的情况,避免对轮胎的伤害。
6、模组化设计及标准化接口
维护性好,日常运营检修与维护简便,可快速完成保养,节约运营成本。
停车机器人能够适应市面上百分之九十五以上的汽车,汇聚在研发中对城市停车中的各种状况做出全面考量,推出了与夹持式停车机器人等相配合的停车机器人产品,是行业内极具创新的“八轮八驱”负载板式停车机器人。