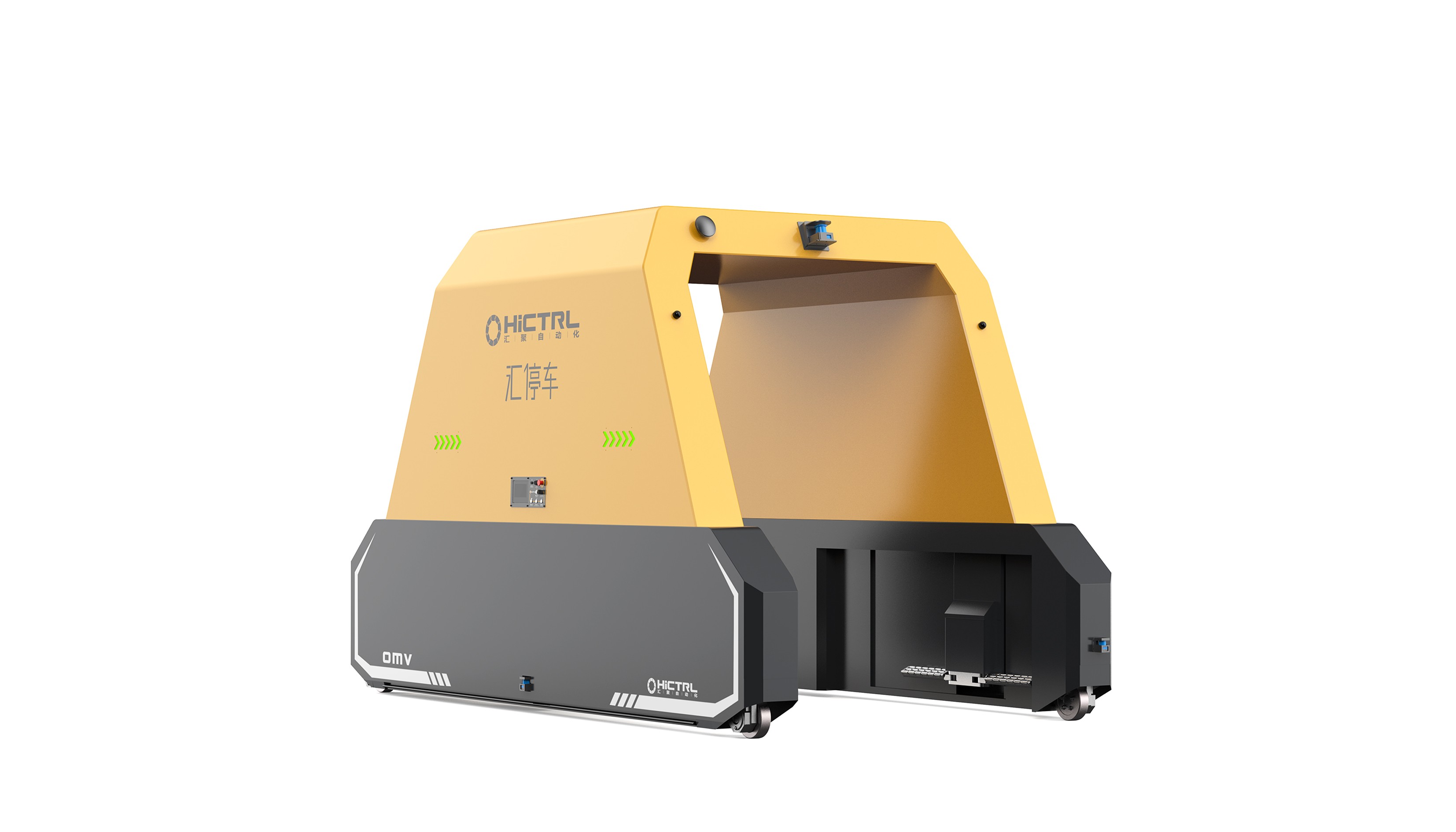
机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+无人叉车工作原理
文章来源: 浏览次数:955次
无人叉车是一种自动化的工业车辆,它能够在没有人员操作的情况下执行货物搬运任务。无人叉车工作原理主要包括以下几个方面:

1. 感知环境:无人叉车配备了多种传感器,如激光雷达、摄像头、超声波传感器等,用于实时感知周围环境、识别障碍物、测量距离和角度等。这些传感器能够将周围环境的信息转化为数字信号,为无人叉车的自主导航和避障提供数据支持。
2. 地图构建:无人叉车通常采用SLAM(Simultaneous Localization and Mapping)技术,结合惯性导航系统(INS)、全球定位系统(GPS)和地标识别等方法,通过这些技术手段,无人叉车能够准确地确定自身位置通过感知到的环境信息,无人叉车会构建一张地图,包括货物存放位置、行驶路径、障碍物位置等,以便后续的路径规划和导航。
3.路径规划:基于构建的地图和目标位置,无人叉车会进行路径规划,确定合适的行驶路径,考虑到货物位置、障碍物避让、行驶安全等因素。
4. 自动导航:无人叉车根据路径规划,通过自动化控制系统对传感器数据的实时处理和对导航算法的执行,实现对车辆的控制和动作执行,能够沿着规划好的路径行驶,同时实时感知环境并做出相应的调整。同时,控制系统还包括安全系统,能够监测车辆状态、预警风险并采取相应措施,确保无人叉车的安全运行。
5. 货物操作:当无人叉车到达目标位置时,自动化控制系统会根据预先设定的操作指令,如提升、放置、搬运等,完成货物的操作任务。
5. 无线通信:无人叉车通常配备无线通信模块,与中央控制系统进行数据交换和指令传递。通过与中央控制系统的实时通信,无人叉车可以接收任务指令、更新地图信息、上传运行数据等,实现对车辆的远程监控和调度管理。
自动化控制系统是无人叉车实现自主工作的核心,它包括感知模块、决策模块和执行模块。感知模块负责感知环境信息,决策模块根据感知到的信息进行路径规划和任务执行决策,执行模块则负责控制车辆的运动和执行货物操作任务。这些模块通过先进的算法和技术相互配合,实现了无人叉车的高效工作和安全操作。
(文宣部分内容来源于网络,仅代表个人观点,并不代表公司意图,如有侵权或用词不当,请联系小编修改或删除)