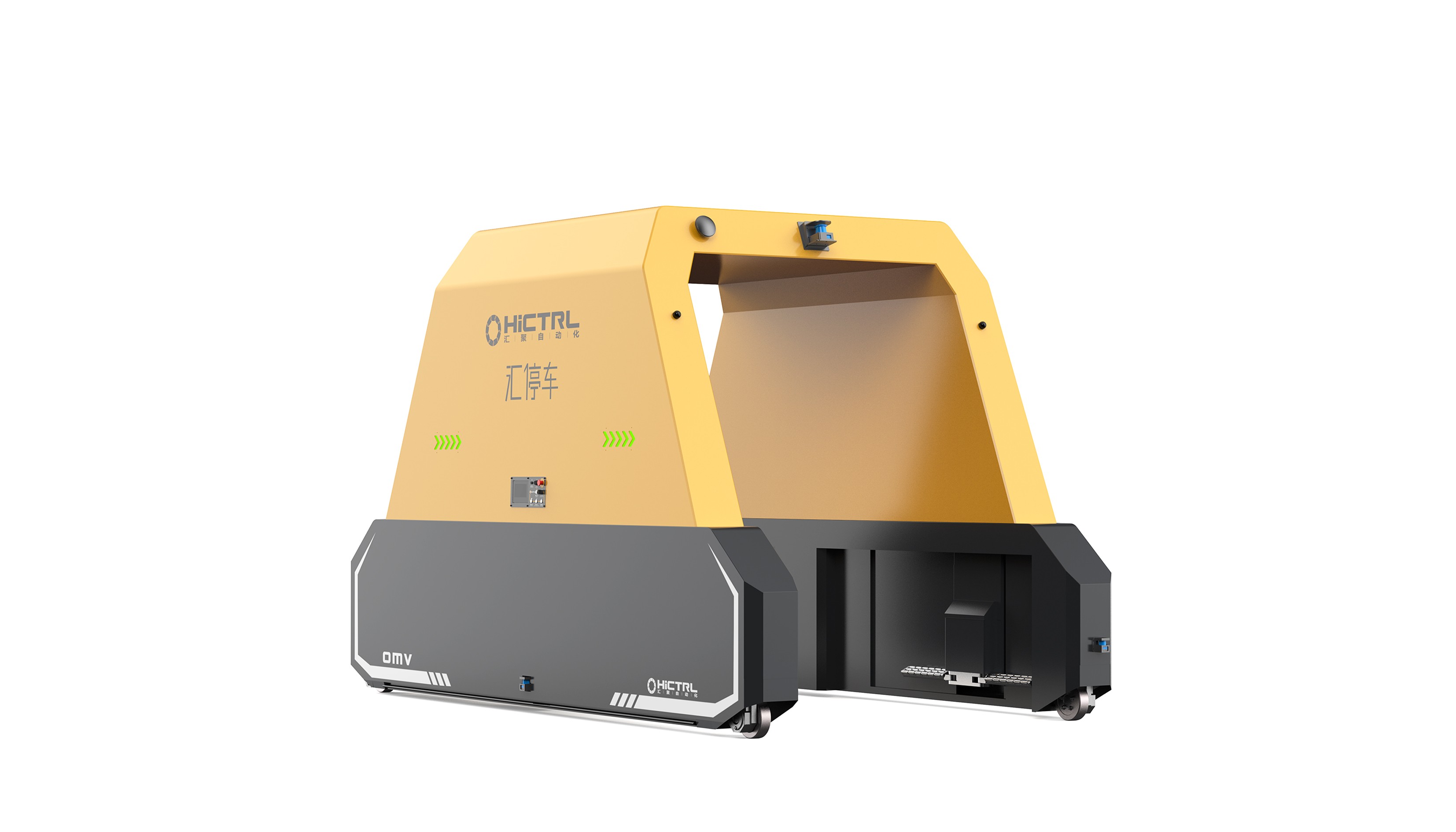
机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+轮式移动机器人如何实现产线任务调度?
文章来源:汇聚OMV 浏览次数:611次
轮式移动机器人作为产线自动化搬运装卸的重要工具,通过联系、调节离散型物流管理系统,使各环节有效地衔接起来,那么,轮式移动机器人是如何实现产线任务调度的呢?

综上, 轮式移动机器人就是通过一系列数据和信息的通讯变换过程完成任务调度,从而在各个行业领域中发挥了越来越重要的作用。
- 信号交互
- 任务调度
- 无线通信
- 能源管理
- 障停保护
- 实时监控
综上, 轮式移动机器人就是通过一系列数据和信息的通讯变换过程完成任务调度,从而在各个行业领域中发挥了越来越重要的作用。
注:此文章由小编撰写,如有用词不当,可联系修改或删除。
- 上一个: 人工搬运VS智能物流搬运机器人
- 下一个: 防爆AGV叉车在现代物流行业的应用