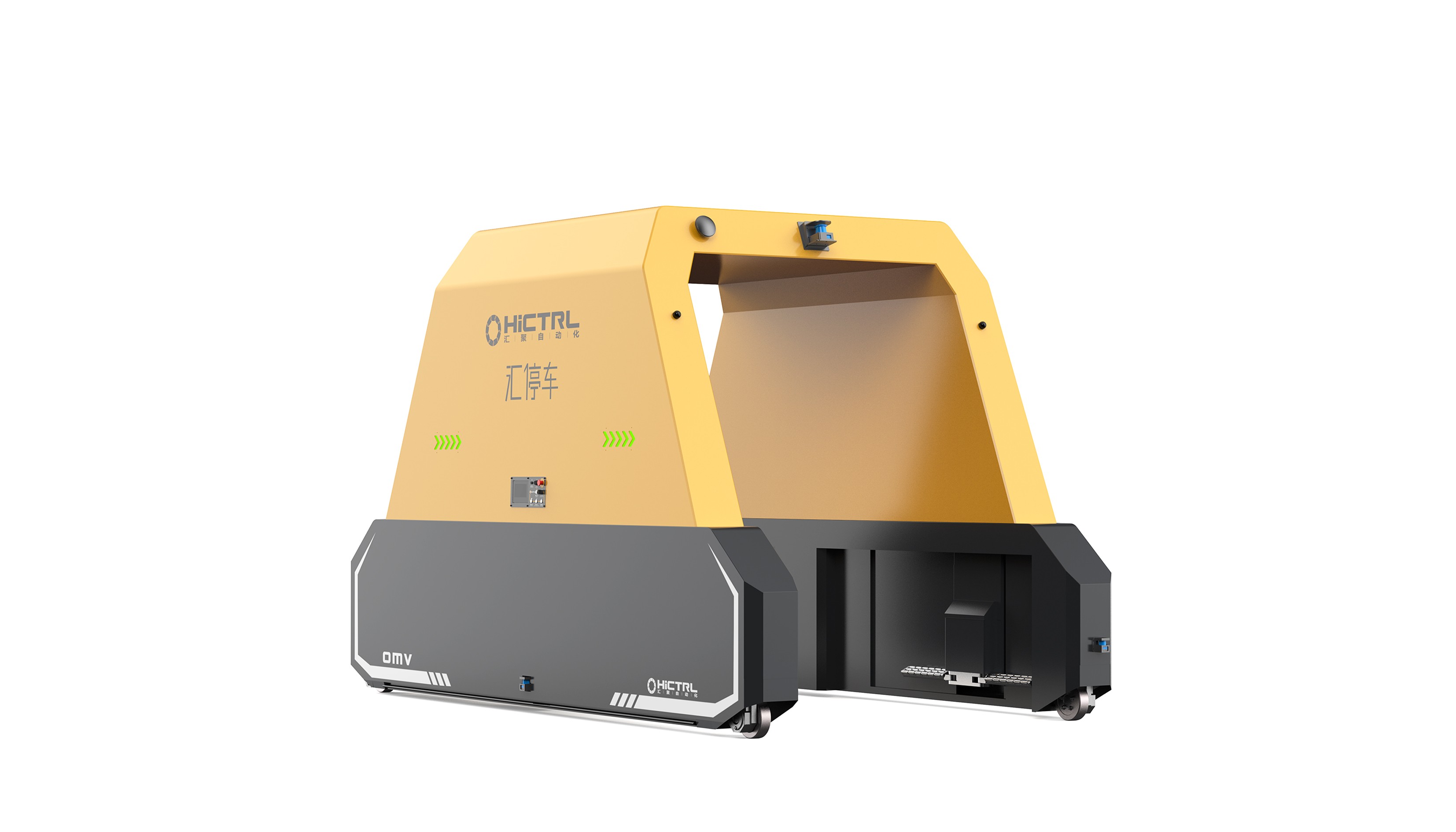
机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+无人智能叉车调度作业无缝衔接,实现效率流程均衡化管理
文章来源:汇聚OMV 浏览次数:1060次
随着导航技术的不断突破,令无人叉车行走自如;通过与企业的MES、WMS等系统双向信息集成,实现作业指令与作业反馈信息闭环,信息流和实际物流同步;通过WMS远程下发作业任务,由智能调度系统针对任务向各个无人叉车下达作业指令,协调无人叉车各司其职各行其道;无人叉车通过配备RFID系统扫描,能够与电梯进行对接,实现跨楼层的物料运送;通过精确的路线规划和安全管制办法保证车与车之前不发生碰撞,当一个车辆发生故障时,另外的车辆可以绕道而行。
随着市场的爆发,无人叉车逐渐进入人们的视野。无需人工,自动搬卸物品,系统控制。对于无人智能叉车来说,他是如何认识周边环境的?
激光导引具有定位精度高、自主性强、智能化程度高、适应性强、灵活性强等特点。采用激光导引,无人叉车可以在导引区内准确定位,根据搬运需求的变化灵活改动运行路径。
目前国内先进的智能调度系统可以调度几百台无人叉车。通过自主学习环境,快速建立地图,灵活编制路径,应对多种特殊环境;全数字驱动,通过管理和调度系统,使上百个生产要素被协同与协调,上万条生产指令及作业序列得到最优安排,流程管理、作业调度实现无缝衔接,实现效率流程均衡化管理。对工厂来说,直接减少了工厂线边硬件设备的铺设、减少成本投入,颠覆了传统物流运输作业和管理模式,车间作业现场实现无人化,实现低成本、短周期、全智能、高效率的智能物流。
随着市场的爆发,无人叉车逐渐进入人们的视野。无需人工,自动搬卸物品,系统控制。对于无人智能叉车来说,他是如何认识周边环境的?

激光导引具有定位精度高、自主性强、智能化程度高、适应性强、灵活性强等特点。采用激光导引,无人叉车可以在导引区内准确定位,根据搬运需求的变化灵活改动运行路径。
目前国内先进的智能调度系统可以调度几百台无人叉车。通过自主学习环境,快速建立地图,灵活编制路径,应对多种特殊环境;全数字驱动,通过管理和调度系统,使上百个生产要素被协同与协调,上万条生产指令及作业序列得到最优安排,流程管理、作业调度实现无缝衔接,实现效率流程均衡化管理。对工厂来说,直接减少了工厂线边硬件设备的铺设、减少成本投入,颠覆了传统物流运输作业和管理模式,车间作业现场实现无人化,实现低成本、短周期、全智能、高效率的智能物流。
注:此文章由小编撰写,如有用词不当,可联系修改或删除。