机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+汇聚OMV自动停车机器人的多种停车方式
文章来源:汇聚OMV 浏览次数:2138次
随着自动泊车技术与机器人技术的快速发展,“智能停车库”正日益普及,从根本上解决新老司机的停车难题。自动停车机器人作为智能停车库的核心部件,主要有三种形式:车载版式、梳齿式、夹持轮胎式。
一、车载板式:
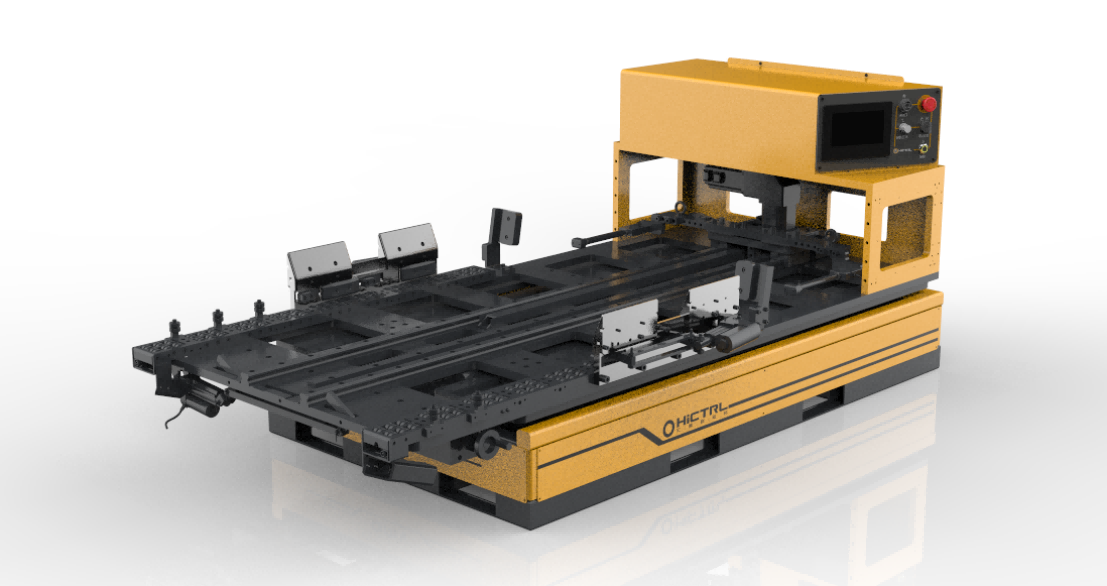
车载板式是应用较为广泛的一种汽车搬运方式, 这种停车方式需将汽车停放在车载板上,停车机器人开入车载版下方(可直行或侧移进入),然后把汽车和车载板一同运载到指定停车位置上。汽车停放好后,停车机器人去抬另一个车台板,以便停放下一辆汽车。
但此车载板类型的停车方式需每个车位要有车台板装置,因涉及到要取空车或存空车板,搬运效率较低,但制造难度较小,方便安装。
视频
OMV车载板式停车机器人采用麦克纳姆全向轮技术,可实现平面内直行、后退、侧移、斜行、自转等任意方向的自由漂移,采用锂电池供电,伺服电机驱动,精度高,控制稳,配合托盘,便可轻松托举汽车转运,结合汇聚研发的自动导航系统、多车自动调度系统和手机APP,实现全程无人全自动停车、取车。
所谓梳齿式就是拥有多个齿隙的像金属梳子的装置,工作方式为:内梳齿固定,外梳齿设置在停车机器人上, 搬运器利用梳齿间隙,通过停车机器人上下升降移动实现梳齿的交叉换位,从而实现车辆的搬运交接,适用于现有经改造的或新建的平面停车库等汽车搬运。
此类型停车方式运行效率相对其他类型最高,但伸出的梳齿需要支撑起整辆汽车的承重,对强度和刚度要求较高,制造工艺难度较大。
三、夹持式:
夹持式停车能直接钻入车辆下面,利用夹持装置将车辆轮胎夹起,把汽车送到停车位上,舍弃了车板或梳齿,结构简单,存取车辆方便快捷,又减少了工程量。
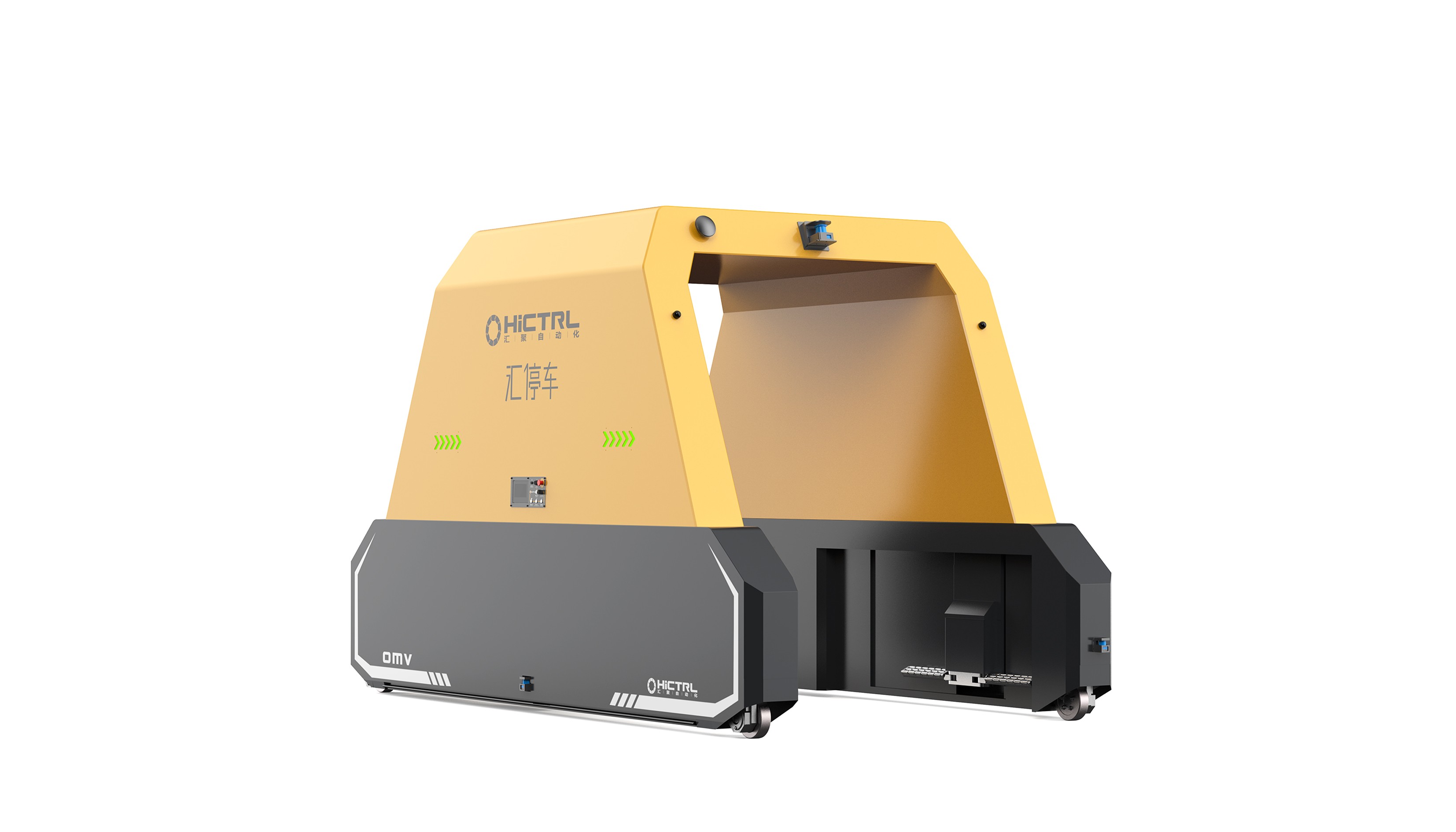
OMV夹持式自动停车机器人无需借助车载板、梳齿、支架等辅助设施,可直接进入车辆下方,通过机械臂适应不同车型的轮距、轴距,直接夹取车轮,移动车辆;夹持式搬运机器人有8个夹臂,可旋转收缩。在初始状态时,夹臂处于收缩状态,能够钻到轿车底部;在举升轿车的状态时,机器人钻入轿车底部的位置后,夹臂开始打开,将轿车抬离地面;在搬运状态时,轿车被夹臂夹离地面后,通过行走机构完成对轿车的搬运工作。
一、车载板式:
车载板式是应用较为广泛的一种汽车搬运方式, 这种停车方式需将汽车停放在车载板上,停车机器人开入车载版下方(可直行或侧移进入),然后把汽车和车载板一同运载到指定停车位置上。汽车停放好后,停车机器人去抬另一个车台板,以便停放下一辆汽车。
但此车载板类型的停车方式需每个车位要有车台板装置,因涉及到要取空车或存空车板,搬运效率较低,但制造难度较小,方便安装。
视频
OMV车载板式停车机器人采用麦克纳姆全向轮技术,可实现平面内直行、后退、侧移、斜行、自转等任意方向的自由漂移,采用锂电池供电,伺服电机驱动,精度高,控制稳,配合托盘,便可轻松托举汽车转运,结合汇聚研发的自动导航系统、多车自动调度系统和手机APP,实现全程无人全自动停车、取车。

所谓梳齿式就是拥有多个齿隙的像金属梳子的装置,工作方式为:内梳齿固定,外梳齿设置在停车机器人上, 搬运器利用梳齿间隙,通过停车机器人上下升降移动实现梳齿的交叉换位,从而实现车辆的搬运交接,适用于现有经改造的或新建的平面停车库等汽车搬运。
此类型停车方式运行效率相对其他类型最高,但伸出的梳齿需要支撑起整辆汽车的承重,对强度和刚度要求较高,制造工艺难度较大。
三、夹持式:
夹持式停车能直接钻入车辆下面,利用夹持装置将车辆轮胎夹起,把汽车送到停车位上,舍弃了车板或梳齿,结构简单,存取车辆方便快捷,又减少了工程量。
OMV夹持式自动停车机器人无需借助车载板、梳齿、支架等辅助设施,可直接进入车辆下方,通过机械臂适应不同车型的轮距、轴距,直接夹取车轮,移动车辆;夹持式搬运机器人有8个夹臂,可旋转收缩。在初始状态时,夹臂处于收缩状态,能够钻到轿车底部;在举升轿车的状态时,机器人钻入轿车底部的位置后,夹臂开始打开,将轿车抬离地面;在搬运状态时,轿车被夹臂夹离地面后,通过行走机构完成对轿车的搬运工作。
- 上一个: 这些行业将成为智能仓储系统方案重要增长引擎
- 下一个: 工业机器人与麦克纳姆轮AGV的融合应用