机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+空间革命:分体夹持式停车机器人如何重塑城市停车生态
文章来源: 浏览次数:28次
在高密度城市中,传统立体车库建设成本高、改造难度大、取车效率低的痛点长期无解。分体式夹持停车机器人以“模块化分离设计+仿生夹持技术”为核心,突破传统AGV停车设备的局限,在仅2.8米层高的空间内实现车辆无人化存取,车位密度大幅度提升。

技术突破:分体式架构的三大创新
1. 模块化分离设计
可拆解动力单元、超薄结构设计
2. 仿生夹持技术
多模态感知系统、自适应柔性夹具
3. 群体智能调度
分布式路径规划、能量共享网络
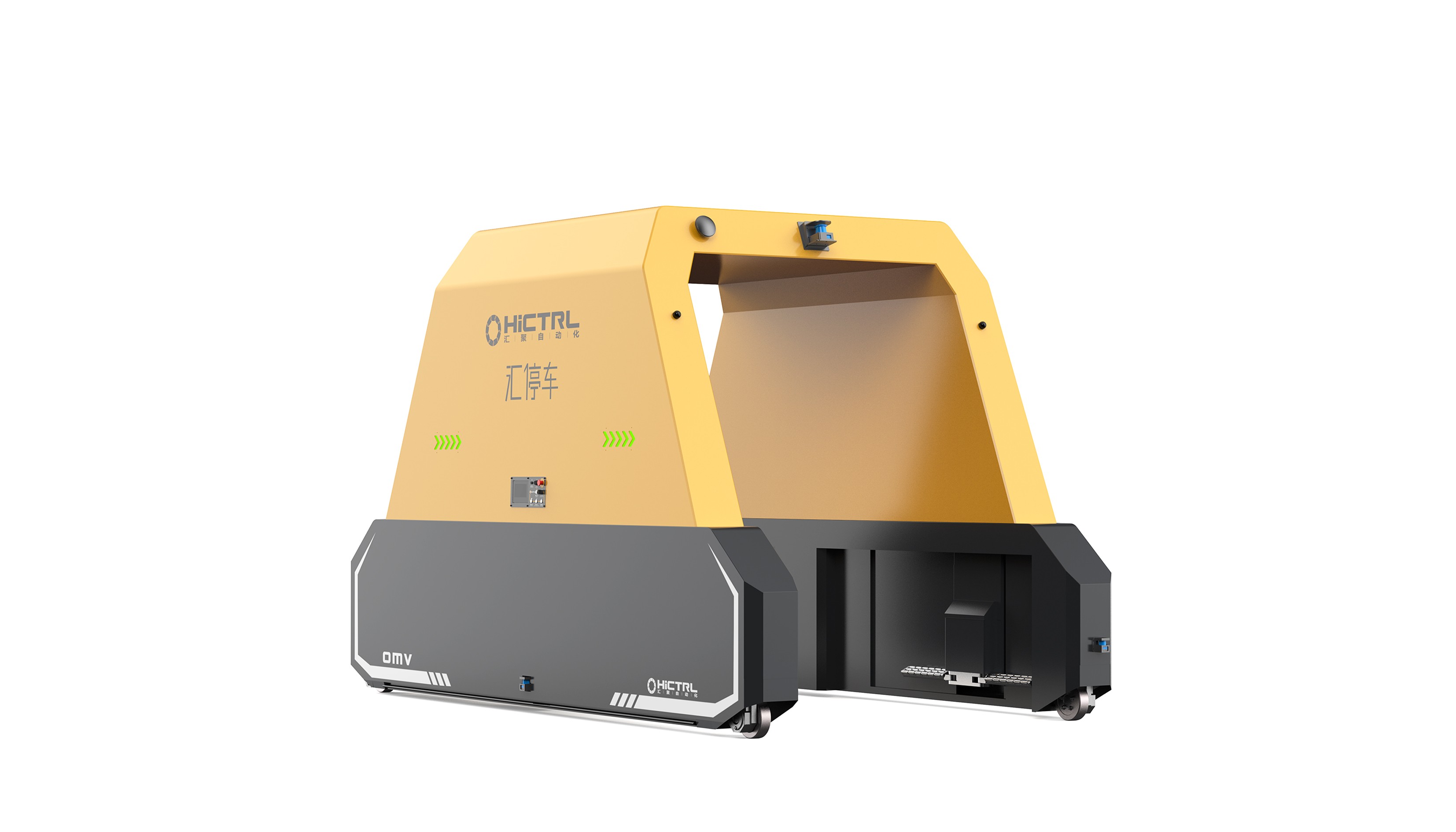
上海汇聚分体夹持式智能停车机器人:机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。机器人最大区别与连体式机器人的特点就是可横向和纵向两个转进车辆底部,更加突出它的灵活性和适应性。机器人采用双激光导航可自行识别轮胎轮廓自动对中,不需要其他辅助机构对车辆矫正和测量,即可准确对中夹取车辆,节省用户成本。

产品优势:
超薄——降层高,低能耗:机器人采用超薄的结构设计,结合轻量化的制作工艺,本体重量轻,降低了运营成本与建设成本。
无车板及车位施工——节省成本:采用夹持轿车轮胎的方式搬运汽车,无需车板和对车位的大型改造,节约设备成本与施工成本。
控制技术——高效的控制软件与调度算法:利用成熟的汇聚自有控制技术,将高效的控制软件与调度算法应用到机器人上,安全高效的搬运汽车。
智能化与柔性化:整体运营调度实现了智能化与柔性化,行驶路线规划可选用更高效的方式。
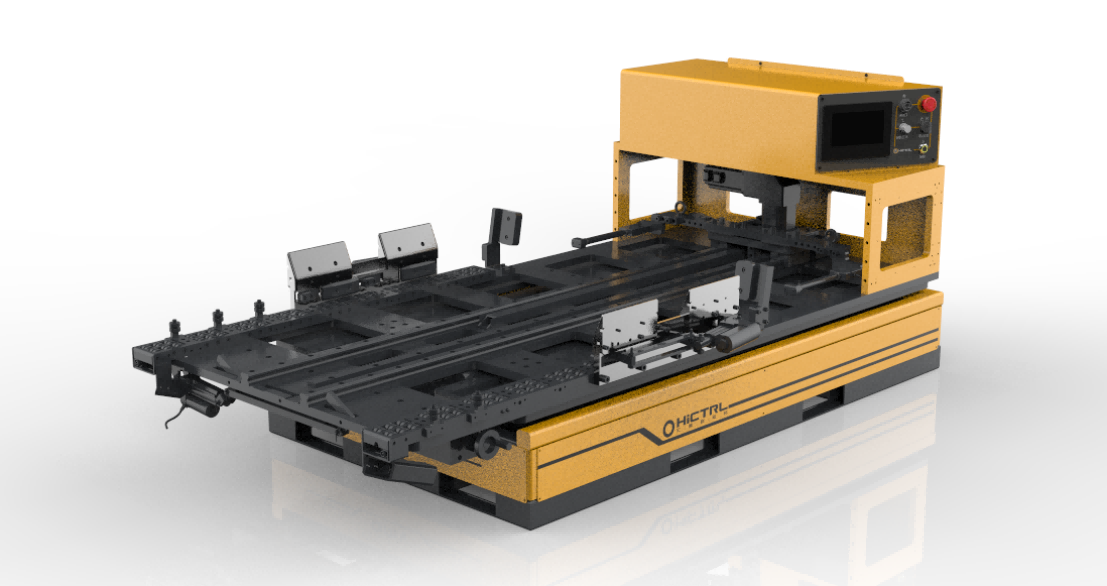
夹持式搬运——辊筒式设计,不伤轮胎:夹持轮胎的夹臂采用辊筒式设计,解决了轮胎对夹臂的摩擦以及单点受力的情况,避免对轮胎的伤害。
模组化设计及标准化接口:维护性好,日常运营检修与维护简便,可快速完成保养,节约运营成本。

分体式夹持停车机器人正从技术创新演变为城市空间重构的杠杆支点。其模块化、柔性化特征不仅破解了存量空间改造难题,更通过“停车-储能-物流”的多维价值叠加,催生出新型城市基础设施形态。在土地资源极度稀缺的超大城市,这项技术或将重新定义“寸土寸金”的内涵——让每一立方米空间都成为可编程、可流通、可增值的数字化资产。
注:此文章由小编撰写,如有用词不当,可联系修改或删除。
- 上一个: 暂无上一篇
- 下一个: 智能铸造新范式:铁水转运AGV如何破解浇铸行业百年难题