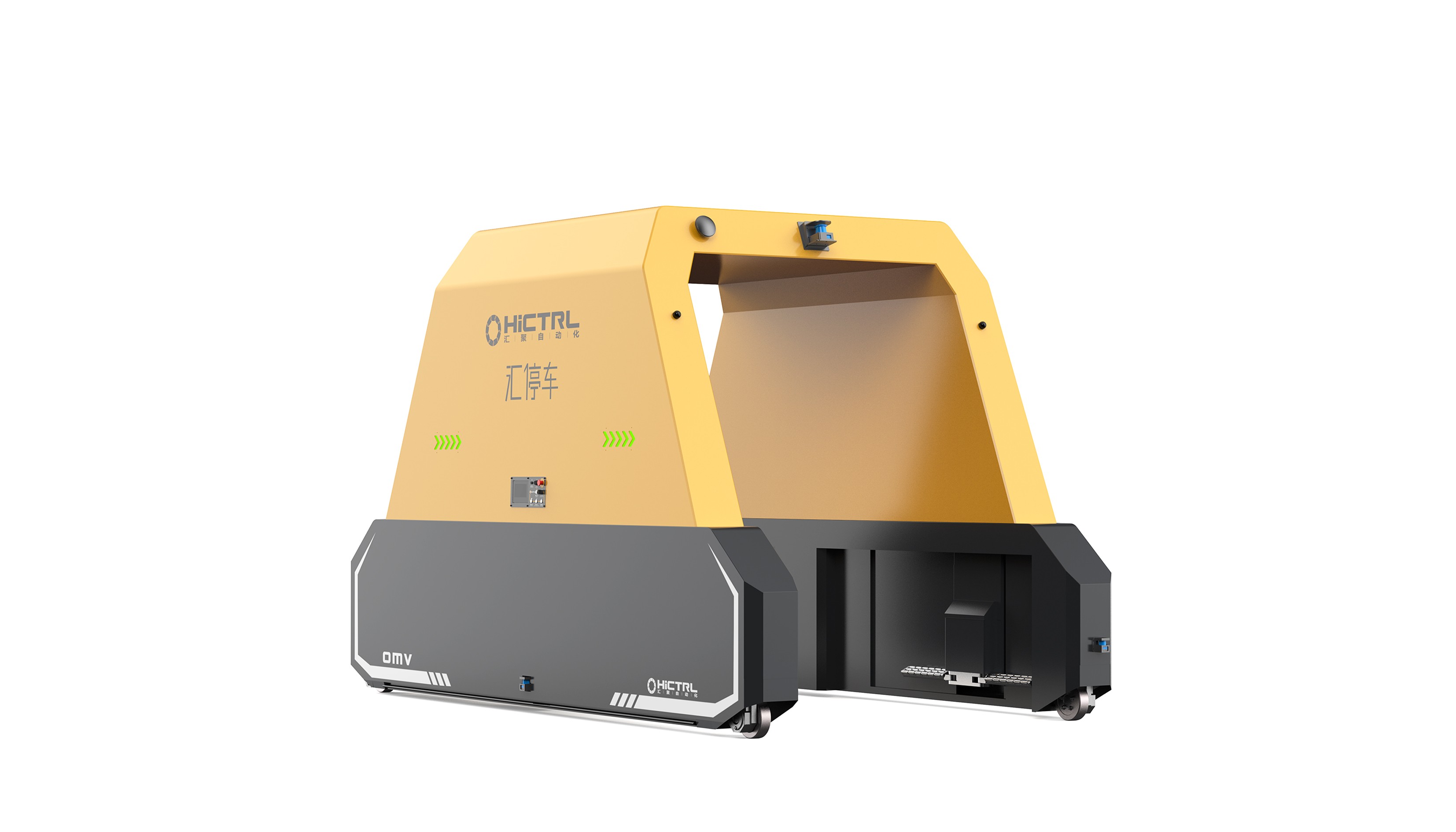
机器人载重2.8吨,最快行驶速度可达每秒1.0米, 应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。
DETAILED+自主移动机器人如何走向智能_汇聚自动化omv
文章来源:汇聚OMV 浏览次数:1049次
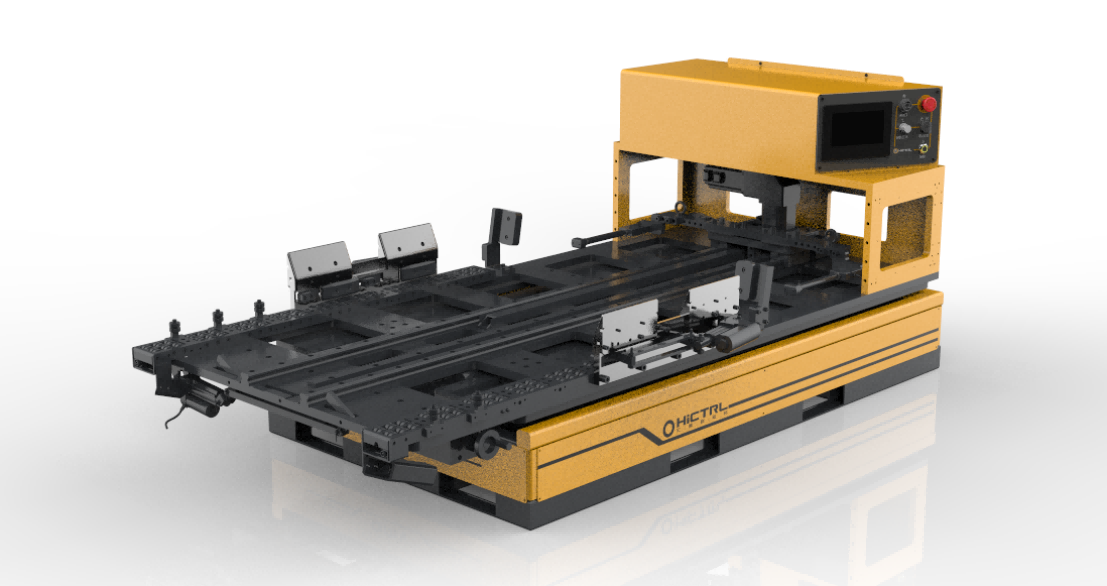
自主移动机器人(AMR)具有极强的环境感知能力,它利用激光雷达、深度摄像头、超声波雷达等传感器以及复杂软件中的数据,探测周围环境,选出到达目的地最有效的途径,可以在有大范围柔性运输的场景下灵活运行,同时又能从容解决生产设备重复使用率低的核心问题,轻松实现资产保值。然而,现代化工厂应用环境通常对移动机器人的运用并不是十分友好,比如高动态作业环境和长廊作业环境,对于机器人来说都是没有参考物可用的,那么,自主移动机器人如何走向“智能”?

同时,自主移动机器人可适配多种车型,以及属具,根据客户需求来定制为:双轮差动、前驱单舵轮、 后驱单舵轮、三驱全向、四驱麦克纳姆轮、双舵轮等,用多种型号满足企业的不同应用需求。
注:此文章由小编撰写,如有用词不当,可联系修改或删除。